Bravo, quaternion is the (only) way to go, the sooner UAV/UAS system designer realize this the better.
Quaternions and 3D Geometry: https://en.wikipedia.org/wiki/Quaternion#Quaternions_and_thr...
* https://arxiv.org/html/2602.06811v1/figure/SciRob_Fig2_Chara...
* https://arxiv.org/html/2602.06811v1/figure/SciRob_Fig7_Discu...
Edit: It references ELRS but I don't see one of the standard Lora tower antennas used in the smallest commercial modules. They also often use an unshielded esp32 Soc instead of the full module.
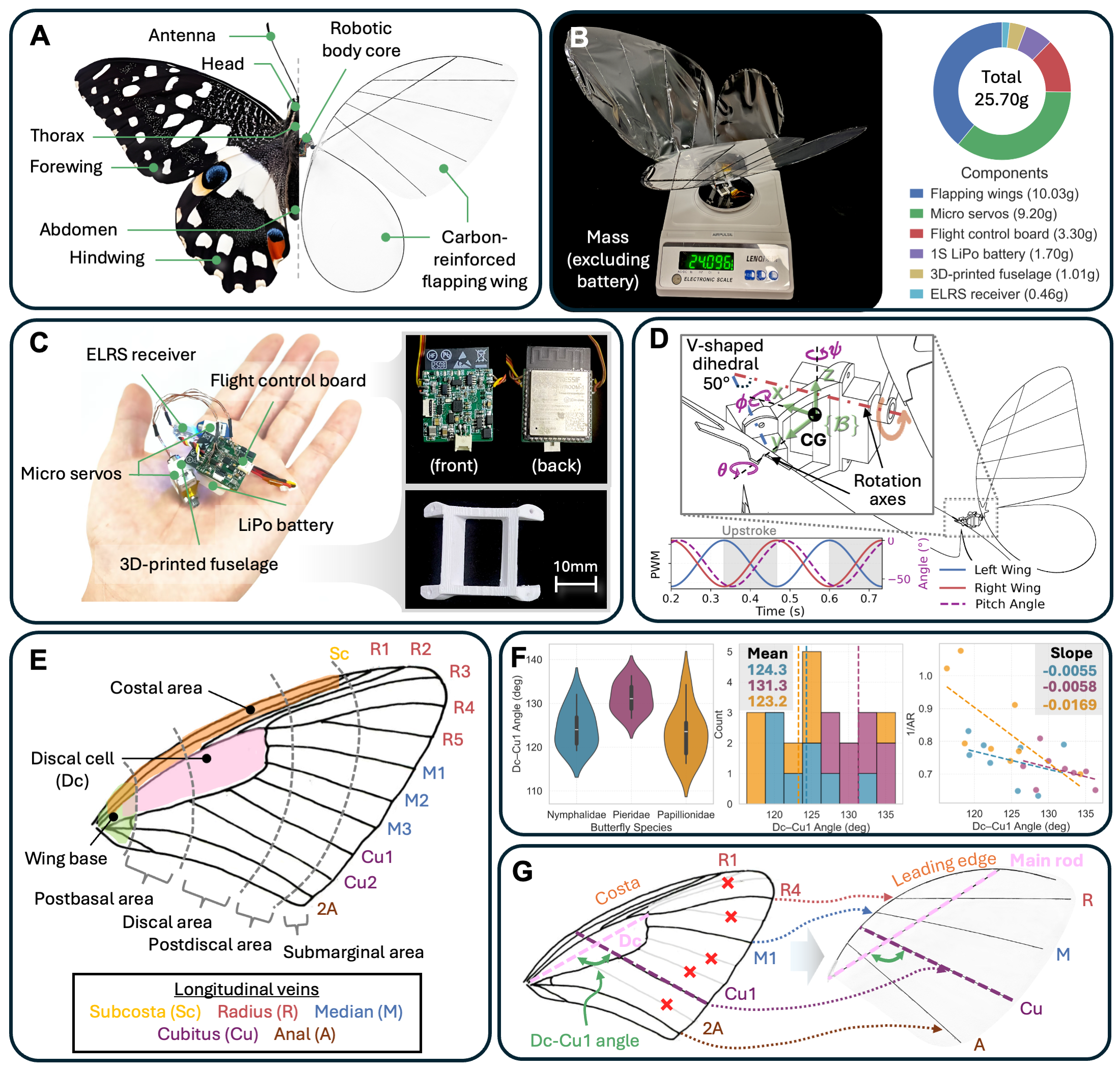
The onboard embedded system is based on an ESP32-S3-WROOM-1-N16R8 (dual-core
32- bit Xtensa LX7, 240 MHz, 16 MB Flash, 8 MB PSRAM), supporting parallel
real-time wing actuation and wireless communication with a custom ground
control station for data logging and monitoring. . . . and an LDO outputs 5 V
to the ExpressLRSmodule. The ELRS module serves only as a safety override for
manual control.On a separate note, if you're looking for something more explicit, there are some suggestive violin plots in item F in the same figure, ironically with the caption even saying "Nymphalidae" (here referring to the family of butterflies, but "nymph" is also a general anatomical term/prefix for female genitals, or particularly the inner labia or clitoris).
I'm having a hard time imagining a situation where flapping wings would be superior to a rotary winged drone. Anyone have any insight?
Oh, and General Gruntle from the second story is cutting deals left and right with the labs that brought us the first.
{kind=link}
{kind=link}
{kind=link}
{kind=link}